US-Wissenschaftler haben ein neuartiges weiches, flexibles und anpassbares Probenahmegerät entwickelt, mit dessen Hilfe verschiedene Arten von Organismen aus dem Meer gesammelt werden können, ohne sie zu schädigen.
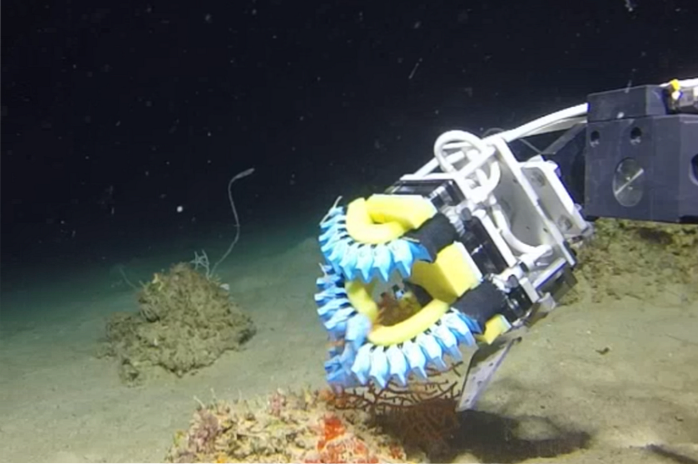
Das "Soft Gripper" -Gerät mit zwei bis fünf "Fingern" aus Polyurethan und anderen matschigen Materialien, die sich über ein Niederdruck-Hydraulikpumpensystem öffnen und schließen, das Meerwasser verwendet, um ihre Bewegung anzutreiben.
Für die Untersuchung der Unterwasser-Meeresorganismen waren spezielle Geräte erforderlich, die an einem ferngesteuerten Fahrzeug (ROV) montiert waren, da jede andere Art von Ausrüstung unter Druck reißen könnte.
"Viele der Tiere, denen wir in der Tiefsee begegnen, sind neue Arten, und diese weichen Roboter ermöglichen es uns, feinfühlig miteinander zu interagieren und eine vielfältigere Fauna zu untersuchen", sagte David Gruber, Professor an der City University of New York.
Die Greifer waren an einer Holzkugel befestigt, die mit ROVs harten klauenartigen Werkzeugen gehalten und manipuliert wurde, die von einem menschlichen Bediener auf dem Schiff gesteuert wurden, an das das ROV angebunden war.
In der Studie, die in der Zeitschrift PLOS ONE veröffentlicht wurde, testete das Team die neueste Version seiner weichen Greifer auf einer Reise an Bord von R / V Falkor im abgelegenen Schutzgebiet der Phoenix-Inseln im Südpazifik.
Die weichen Greifer waren in der Lage, Meeresschnecken, Korallen, Schwämme und andere Meereslebewesen viel effektiver und mit weniger Schäden als herkömmliche Unterwasser-Probenahmewerkzeuge zu sammeln.
Basierend auf den Eingaben der ROV-Bediener druckte das Team 3D-gedruckte „Fingernagel“ -Erweiterungen, die an den Fingern des Greifers angebracht werden konnten, um sie unter Proben zu bringen, die auf harten Oberflächen saßen.
Zu jedem Finger wurde auch ein flexibles Netz hinzugefügt, um die Proben im Griff der Finger zu halten.
Eine weitere Version der Greifer mit zwei Fingern wurde ebenfalls erstellt, basierend auf der Vertrautheit der ROV-Piloten mit der Steuerung vorhandener Greifer mit zwei Fingern und ihrer Forderung, dass die beiden Finger Proben mit einem „Quetschgriff“ (für kleine Objekte) halten können. und ein "Kraft" -Griff (für große Objekte).


